 ADI
sterzo
ADI
sterzo
ADI
sterzo
ADI
sterzo
Anche questa volta la cosa che mi ha fatto
perdere più tempo in fase di
progetto è stato lo sterzo.
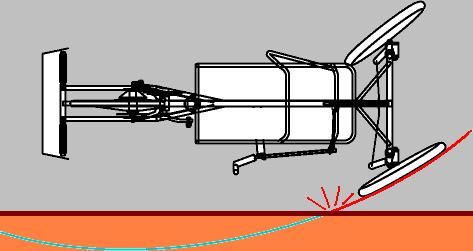
E' la geometria che mi ha causato problemi. Lo sterzo
posteriore
è notoriamente fallimentare perché non si
potrà mai avere concordi le tre forze:
quelle dovute all'avancorsa, alla gravità
e alla centrifuga.
Solo dopo alcuni rifacimenti sono arrivato alla versione finale che ho
ritenuto valida.
Sebbene finora non
abbia avuto problemi non mi assumo comunque
responsabilità
per la realizzazione di copie.
l.delorenzi@libero.it
Sembra assurdo ma la
configurazione che mi ha dato risultati migliori ha il braccio a terra
“trail” di 2,7 cm uguale al
“rake” quindi angolo di sterzo longitudinale
“caster” a 90° e
l’angolo di sterzo laterale del fusello
“kingpin” di 20° con inclinazione della
ruota “camber” a 90° e braccio
a terra negativo di circa 1 cm .
L’angolo del fusello “kingpin”,
normalmente non considerato importante per la stabilità, in
effetti è l’unico che agisce in maniera
determinante in questa configurazione in quanto è la
gravità che determina il riallineamento delle ruote.
Il "trail"positivo contribuisce alla stabilità ma
essendo di solo 2,7 cm la forza centrifuga, che in questo
caso
è negativa in quanto porta al sovrasterzo, rimane
tollerabile.
L'unico problema è un'eccessiva sensibilita di comando del
joystick dovuta al fatto di avere un avancorsa ridotta "trail" ma
utilizzando una camma si può aiutare il mantenimento della
posizione centrale. Questo evita oscillazioni e
serpeggiamenti . Più avanti spiego la sua realizzazione.
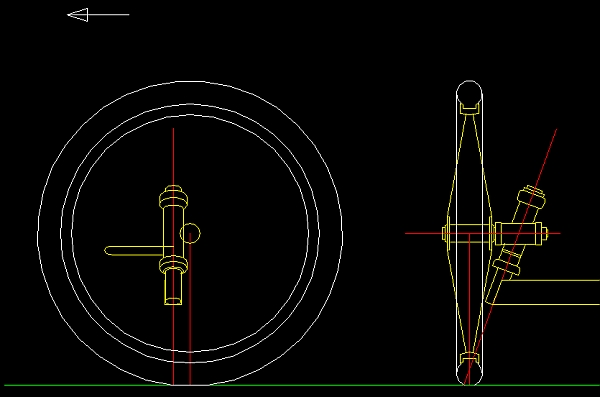
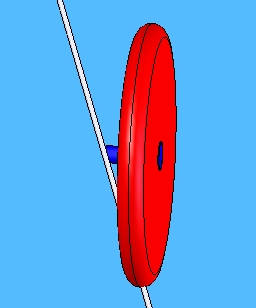
Per determinare
gli angoli ho
usato un modello in 3D e ho simulato la rotazione delle ruote attorno
al fusello rispetto ad un piano di appoggio immaginario.
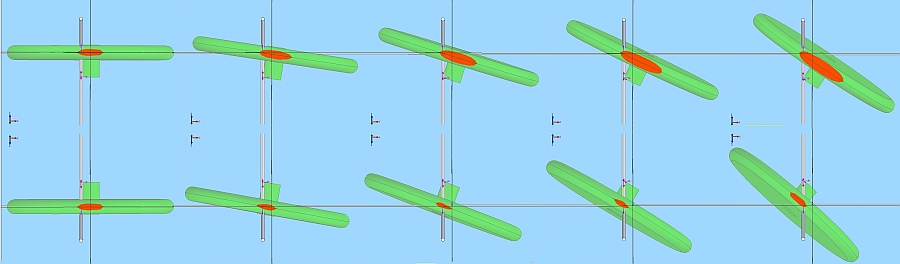
Mantenendo
fisso il piano la
visione dal di sotto mostra di quanto le ruote penetrino in esso.
Questo da la misura di quanto le ruote debbano alzarsi per mantenere
costante la loro impronta a terra, dal piano reale,
"gravità" e di quanto
cambi,
nei vari casi, il braccio a terra “trail”.
Per
ingrandire le seguenti foto fare "click" con il
mouse.




La tiranteria dello sterzo
utilizza snodi a sfera SKF SIKB 6F
Allo sterzo
posteriore bisogna
abituarsi, non si può viaggiare vicini ad un muro
perché per girare ci si allarga dalla parte opposta alla
direzione in cui si vuole andare e quindi
si andrebbe proprio contro al muro.
Questo genera anche una strana sensazione perché per andare
a destra si va prima a sinistra e poi a destra.
Le ruote posteriori
hano i
cuscinetti nei fuselli. Da ogni ruota sono state tolte le
sfere ed è sato allargato il foro.
Un bullone da 12 mm passa attraverso la ruota e un anello fa da battuta
quindi entra nel fusello.
Il fusello ha due cusinetti per la ruota e gira sul suo supporto
tramite
cuscinetti conici da sterzo.
Per ingrandire le seguenti foto fare "click" con il
mouse.




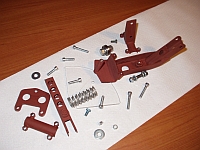
Questa è la camma utilizzata per aumentare la
stabilità
perchè il "trail" deve essere mantenuto piccolo per evitare
il sovrasterzo e questo causa una sensibilità eccessiva
nella posizione centrale ( andando diritti ). La soluzione è
una
camma a molla che simula un avancorsa virtuale e che forzi le ruote ad
andare dritte in rettilineo ma che non influisca sterzando.
Per
ingrandire le seguenti foto fare "click" con il
mouse.



Luciano De
Lorenzi
ADI
Sterzo
ADI
Index
ADY-2
Index
ADY
Index
Home